一時期頭を悩ませた赤道儀の不調、その後の話。
一応今の所は問題はないが、まれに発生することはある。
なので本当の原因は分かっていない。
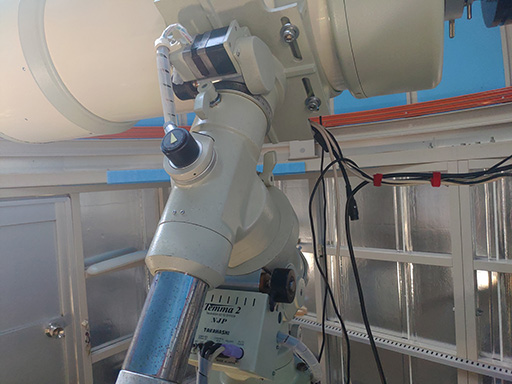
(原因はどうやら赤道儀本体かもしれないとの考えになってきた)
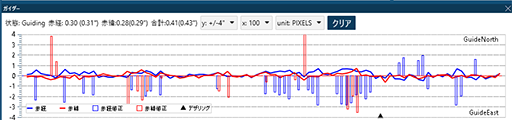
撮影前に、正常かどうかの確認はしている。
あまり時間もかからず、すぐに結果は分かる。
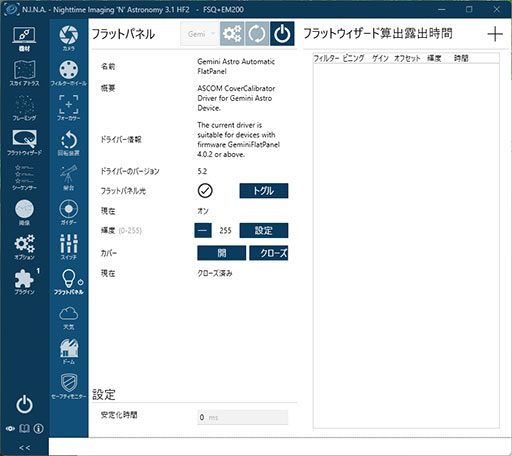
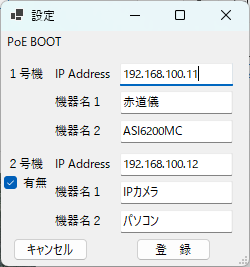
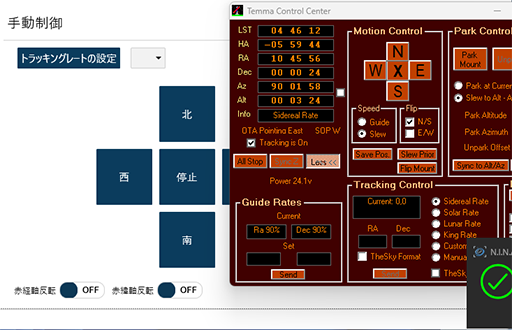
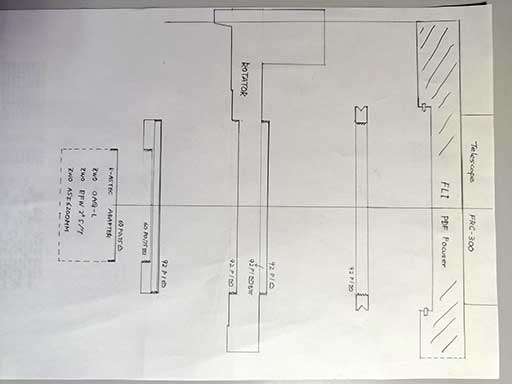
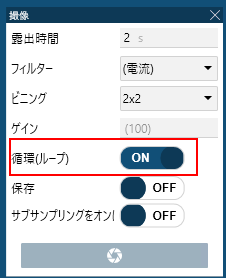
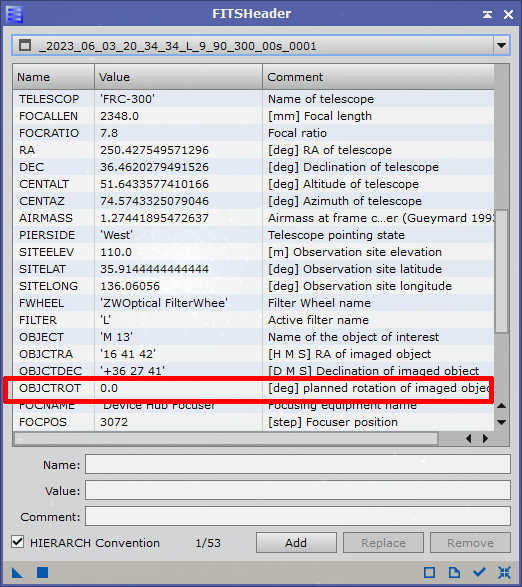
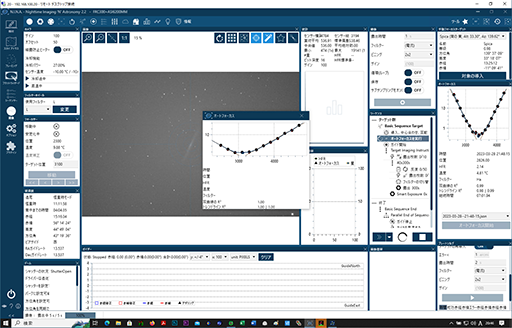
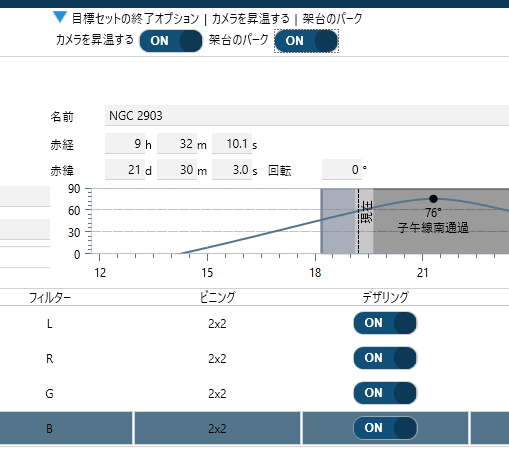
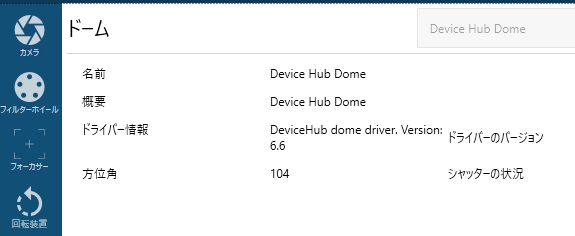
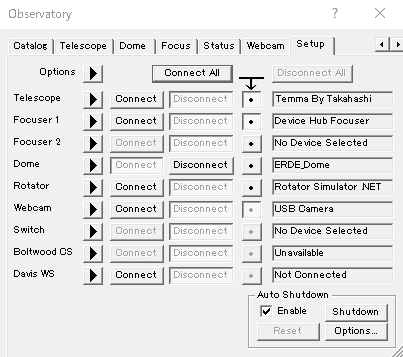
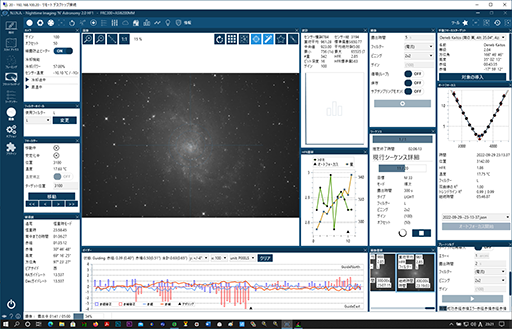
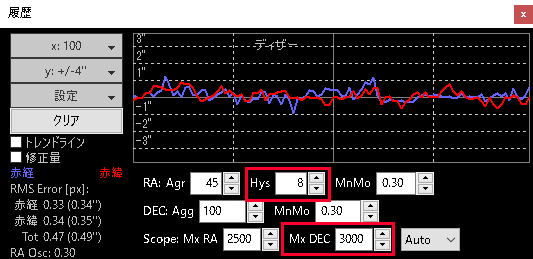
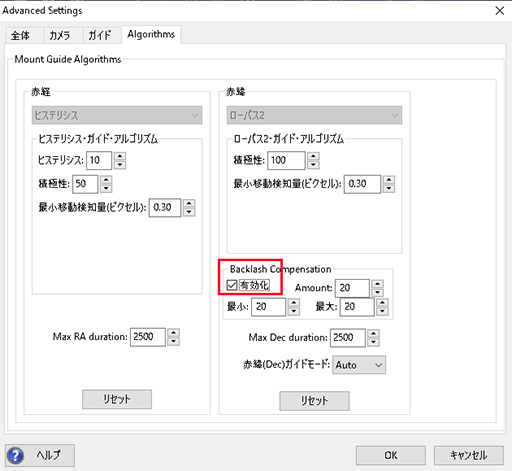
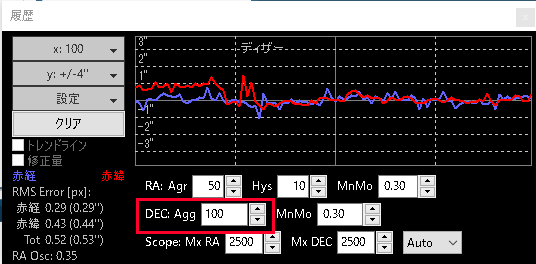
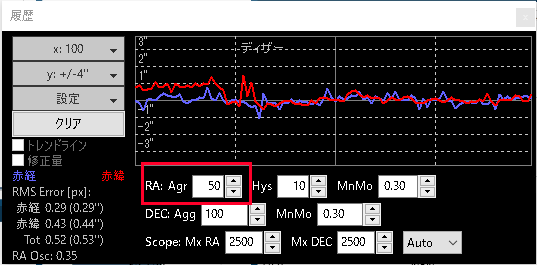
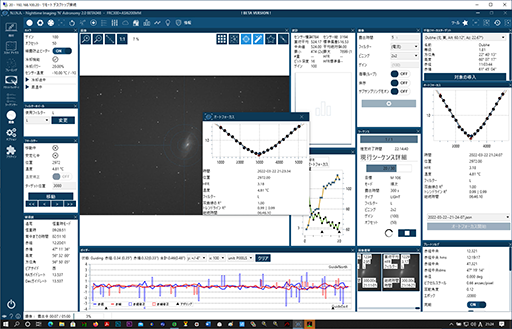
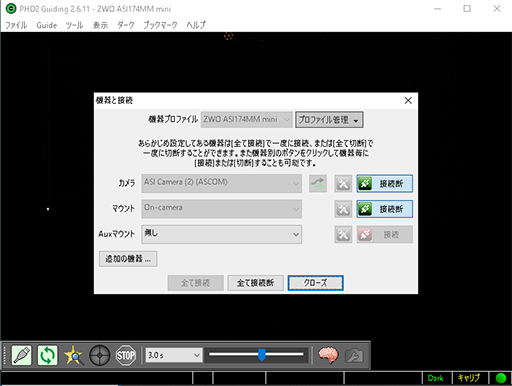
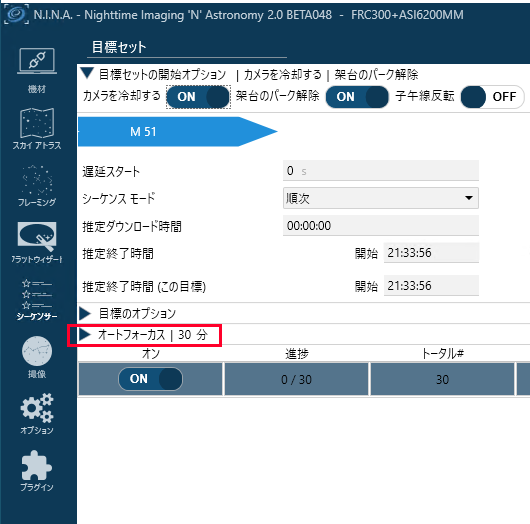
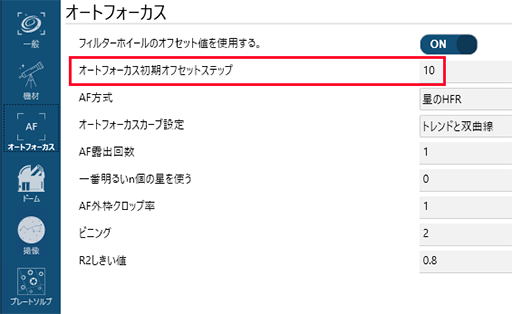
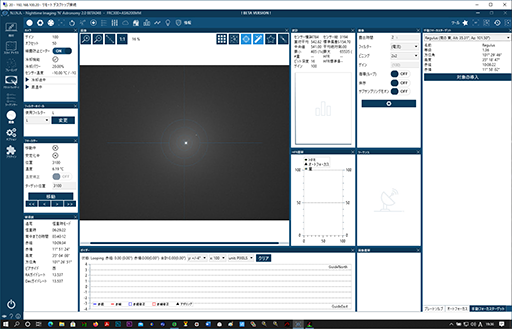
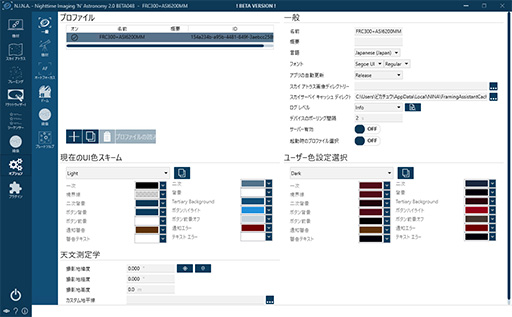
まずは設定内容の確認、
前回と同じなので確認はしないが、異常時は必ず確認する。

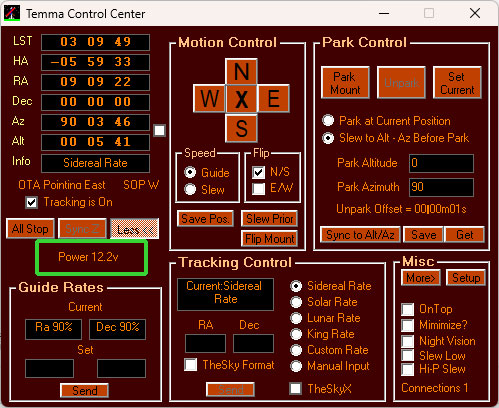
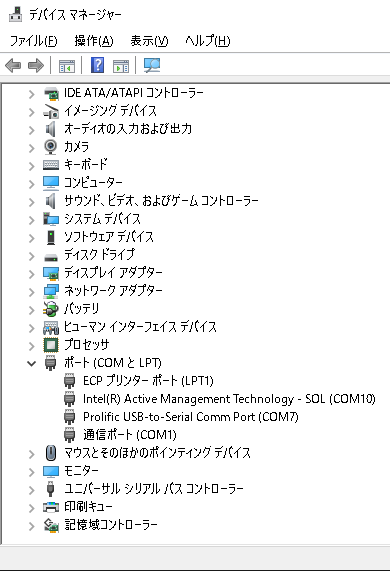
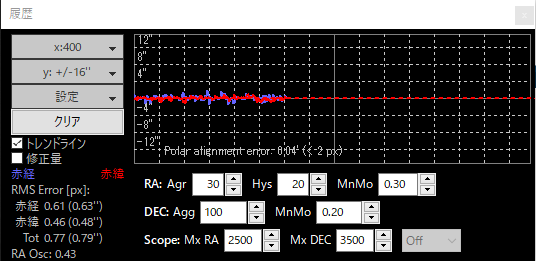
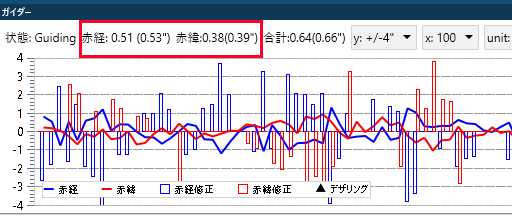
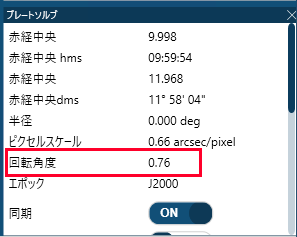
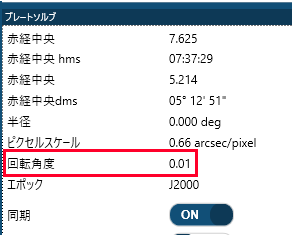
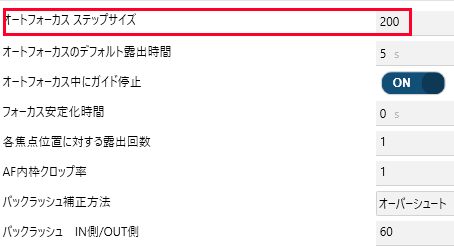
確認する箇所は赤枠内だ。
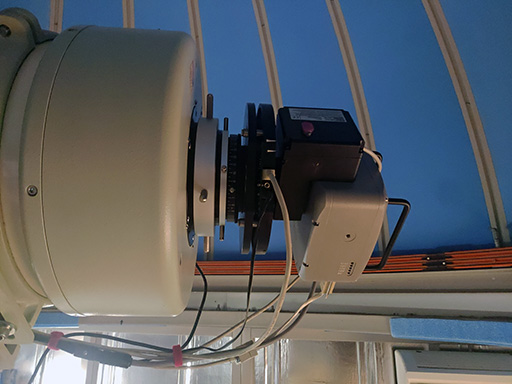
TE(TelescopeEast)にするために、OTA West, Scope Pointing East:筒先は東 の設定だ。
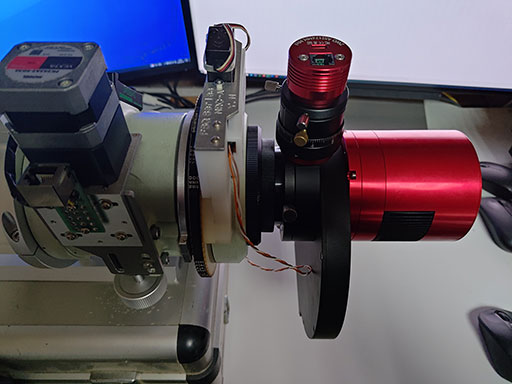
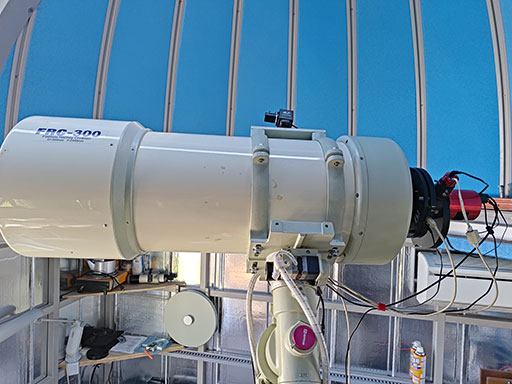
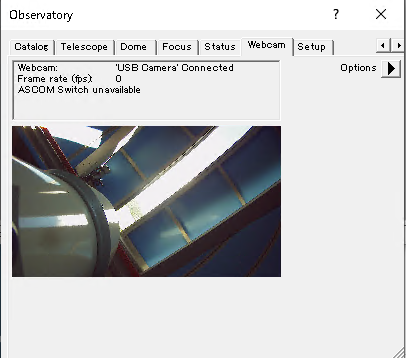
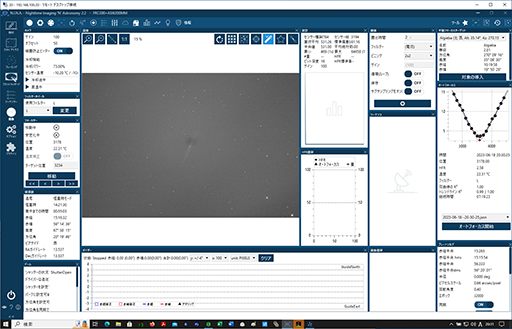
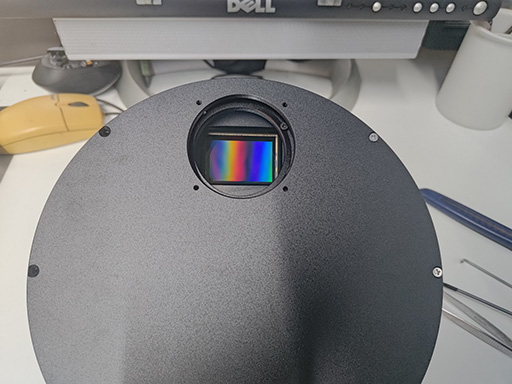
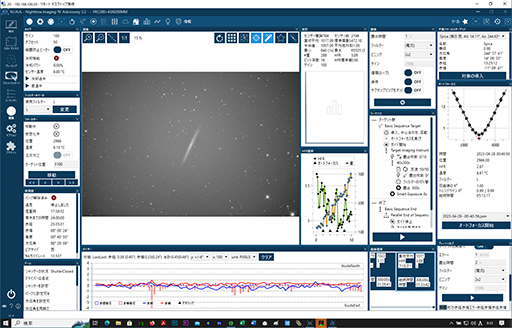
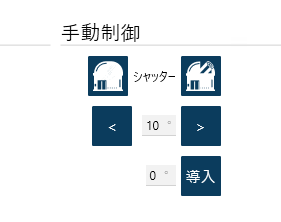
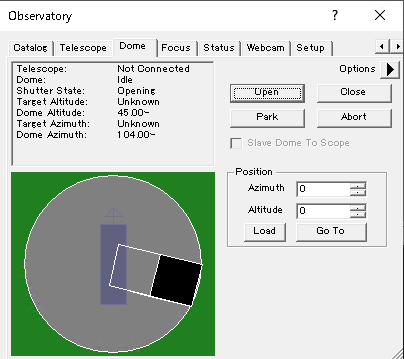
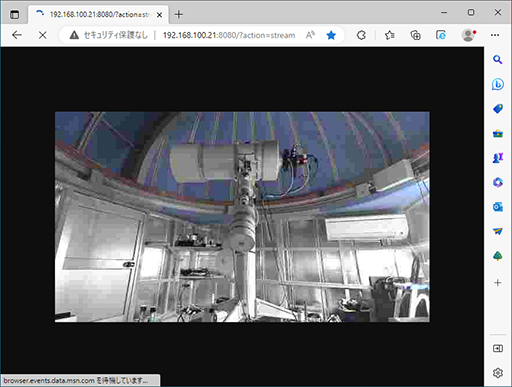
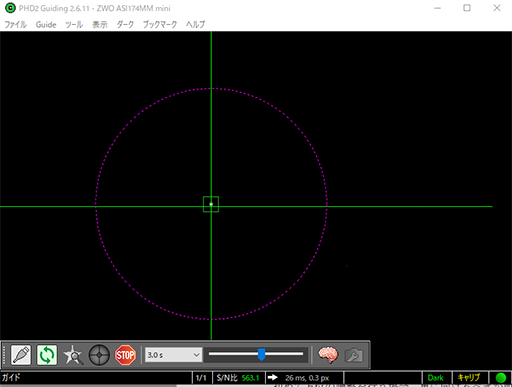
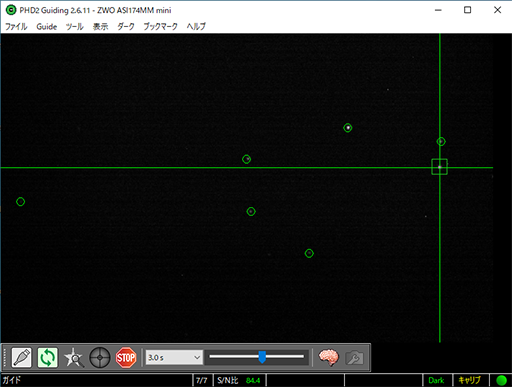
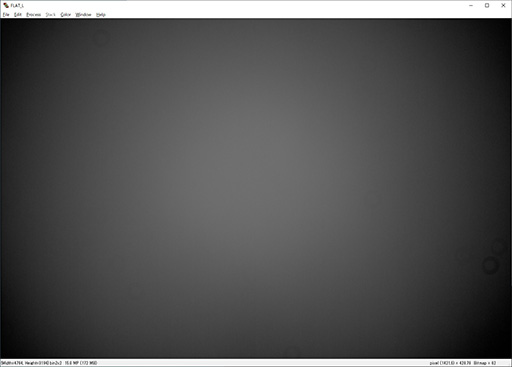
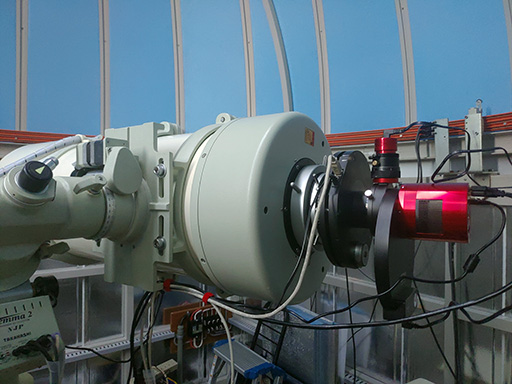
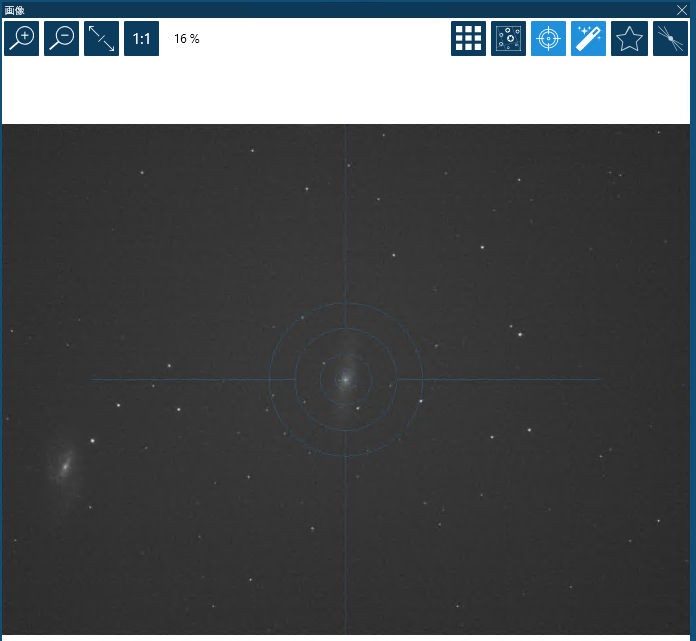
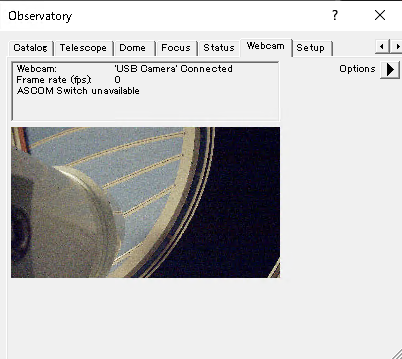
確認の最初は、NINAで接続後に、「S」南へ振ってみる。

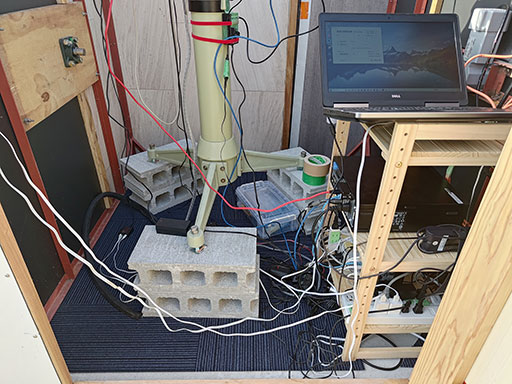
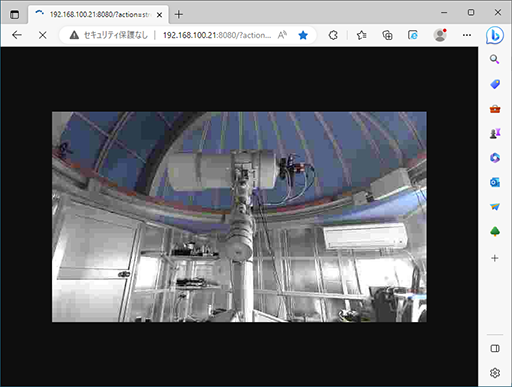
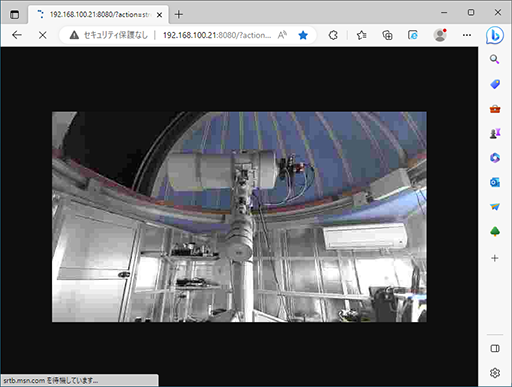
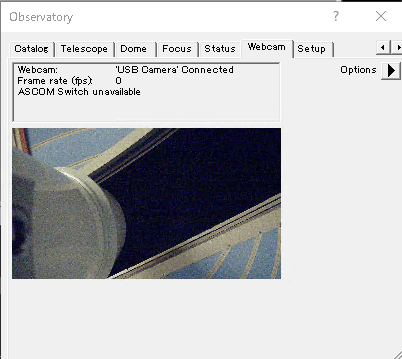
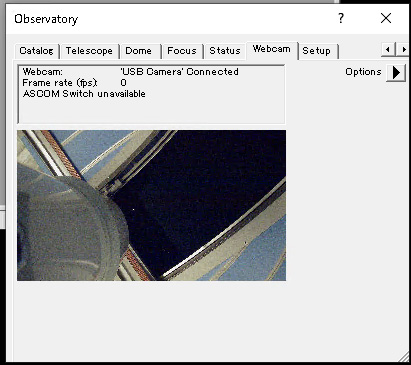
この画像では、筒先は手前側に動き、鏡筒は下を向く(これが正しい動きだ)。
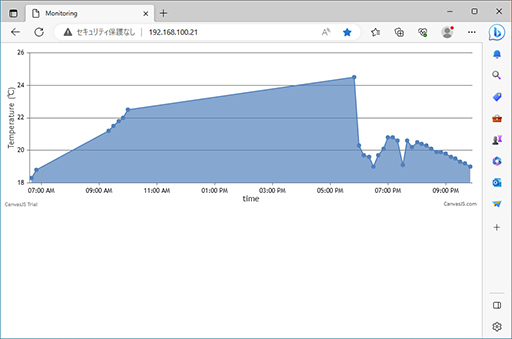
監視カメラの画像を見ればすぐにわかる。
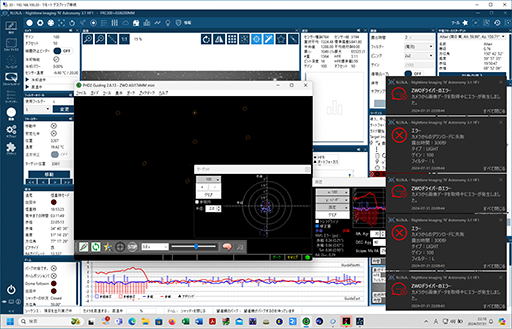
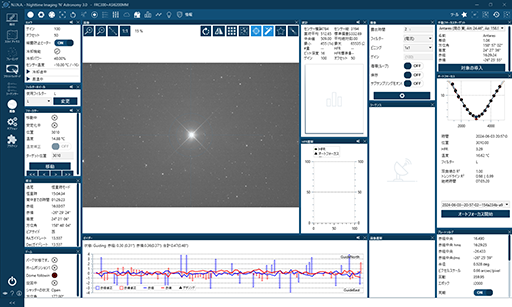
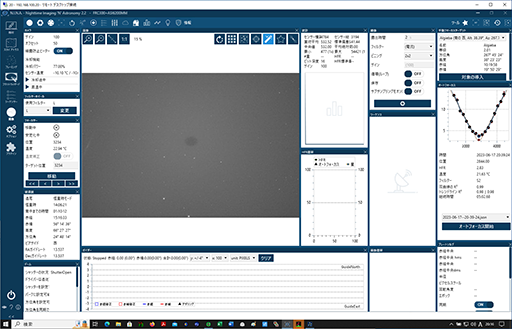
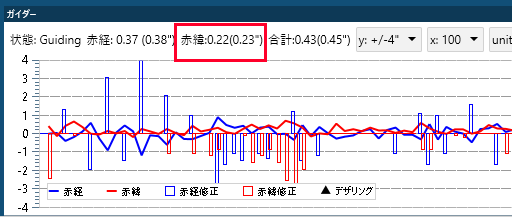
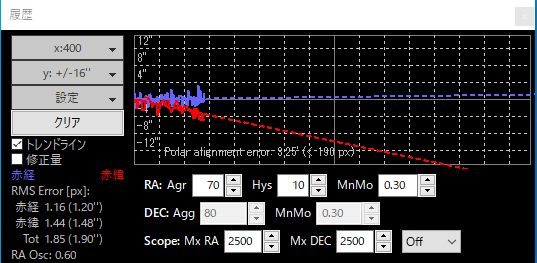
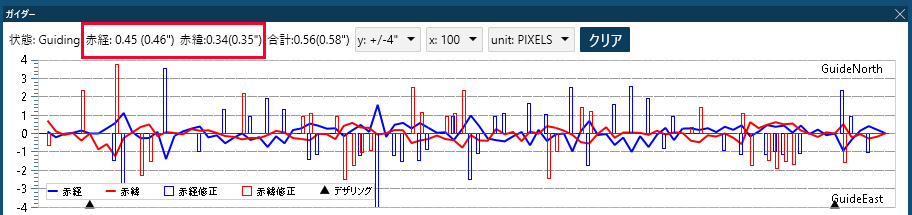
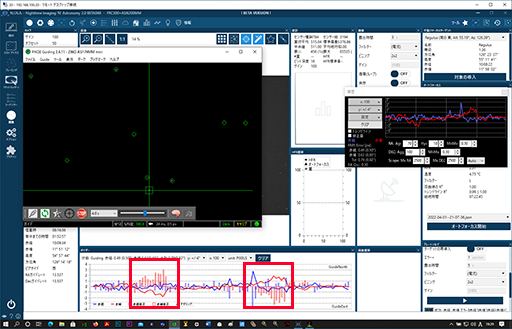
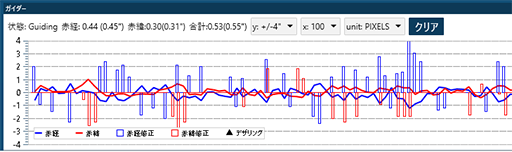
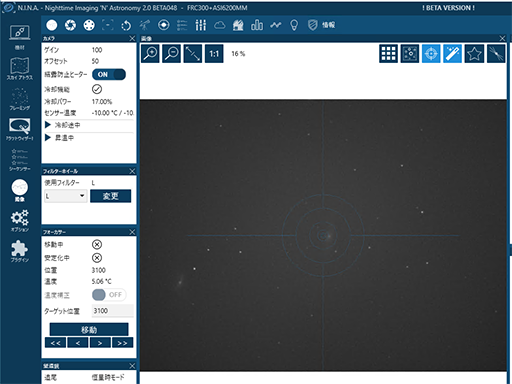
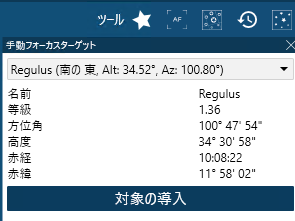
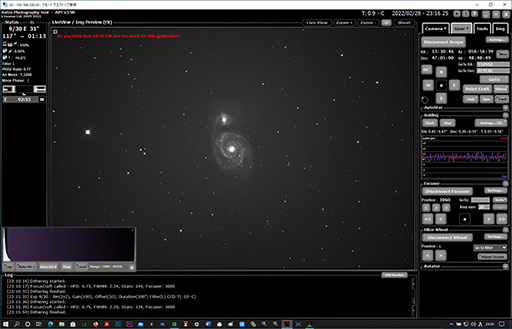
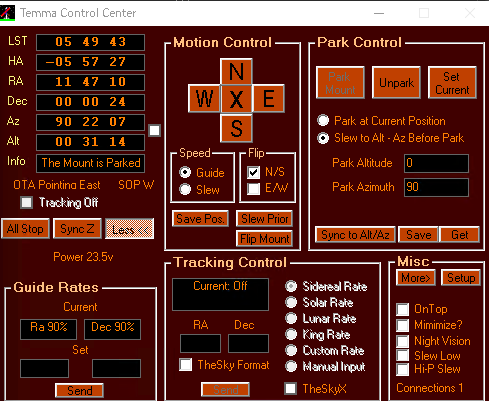
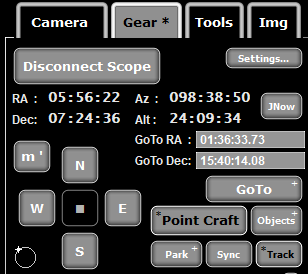
その時の赤道儀の状態は、
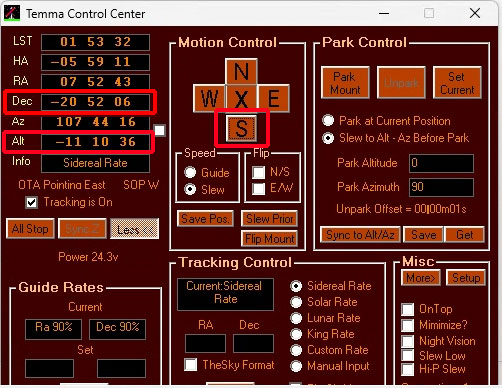
赤枠の通り、ALT(高度)は下方向へマイナス表示し、
Dec(赤緯)もマイナス表示すればOK。
「N」北向きでもいいのだが、「S」南がわかりやすいのでこうしている。
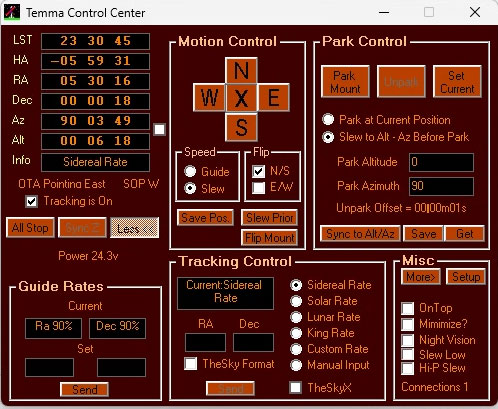
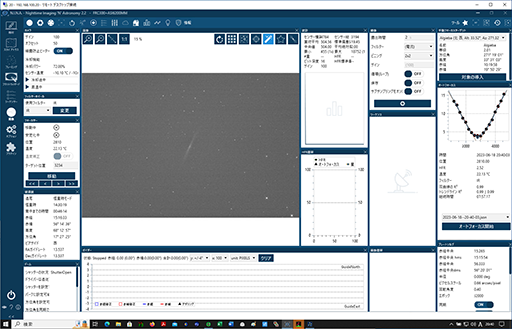
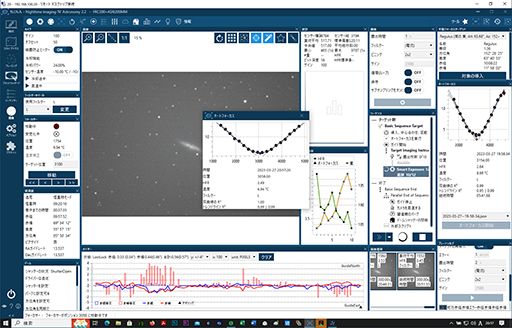
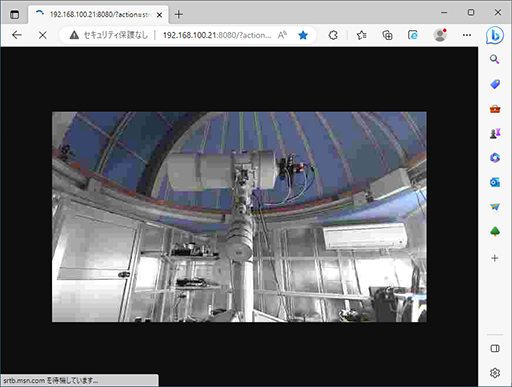
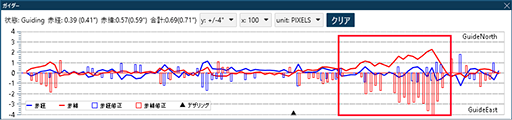
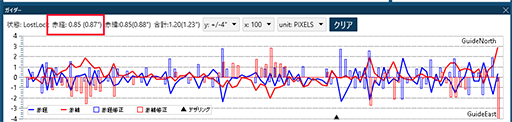
異常時は、こうならずに、
ALT(高度)が逆方向(プラス値)にカウントする、
鏡筒も逆向き(北)に動くときもあるが、南に正しく動くが高度が逆向きのこともある。
とにかく、高度がおかしい表示となる。
NJPやEM10のTemma2兄弟はこんなことは起きないのだがな。
なので赤道儀本体かもしれない、コンデンサーの抜けとか?
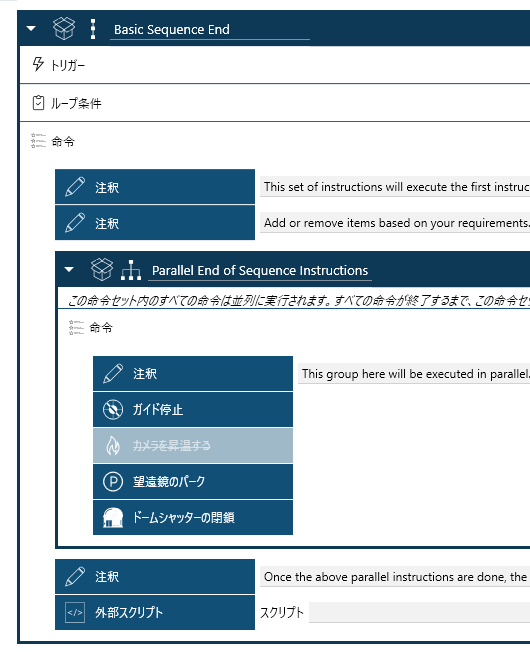
とはいえ、こうなった場合の対処方法はすでに確立している。
手順は、
1.赤道儀を停止し、NINAで接続を解除し、NINAも終了する。
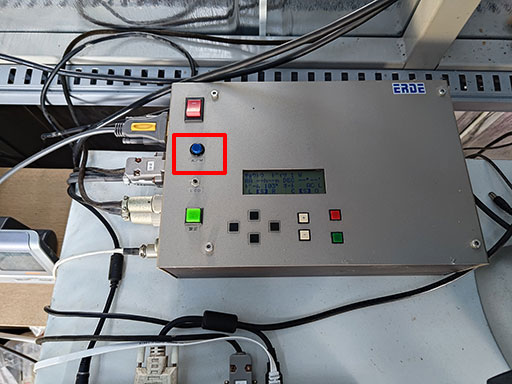
2.赤道儀の電源を一度切り、一呼吸おいて、電源を入れ直す。
(ここが重要なポイント)
パソコンの再起動は不要。
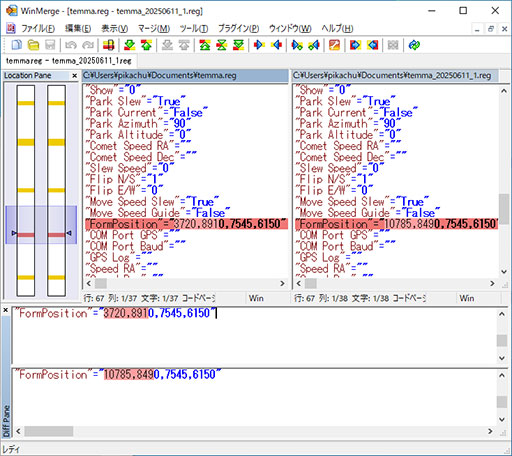
3.正常時のASCOM Temmaのレジストリを取り込む。
(これはホームポジションの復元のため)
4.NINAを起動し、設定内容の確認。
内容が変わらずともOKを押す。
(ここも重要なポイント)
5.NINAから赤道儀を接続する。
これで復旧する。
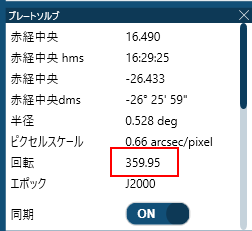
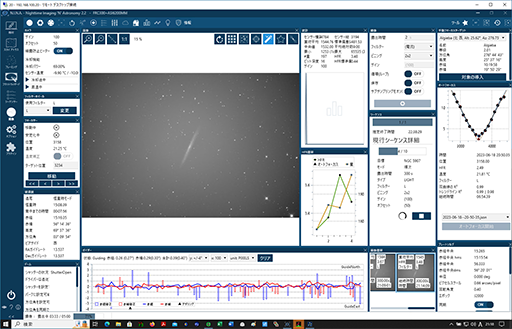
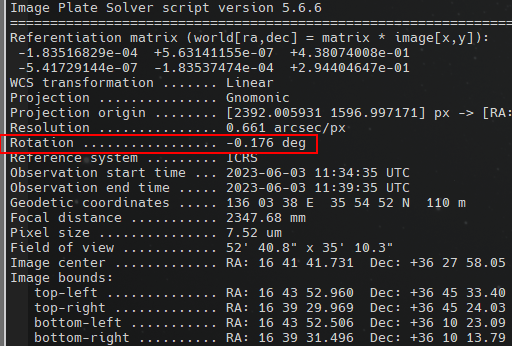
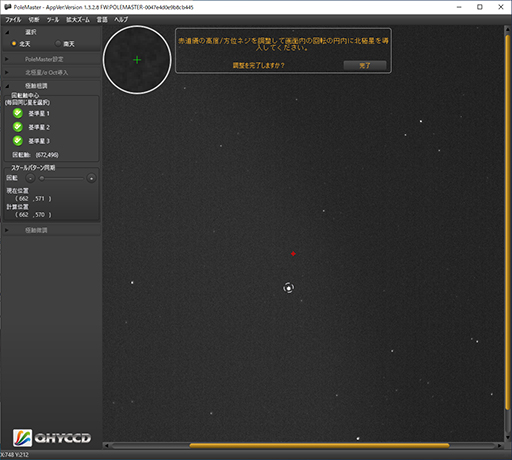
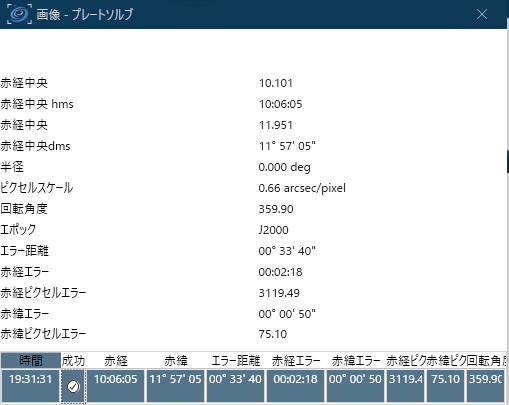
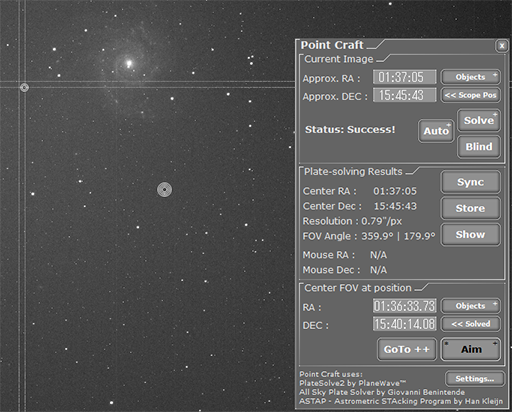
後は、空に向けてPlateSolveすれば完全に同期する。
ただ厄介なことに、これ1回で復旧できる場合もあるが、ダメな場合もある。
それでもあわてず、この手順を繰り返すことで復旧する。
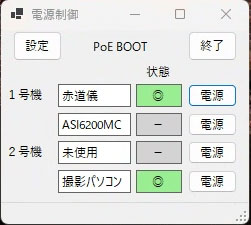
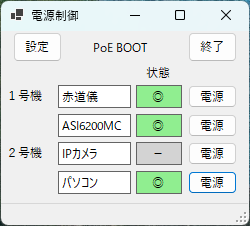
電源は自作のアプリで制御できるようにしている。