前回、フィルターを念入りにクリーニングした。
カメラを取り付けても、カメラの向きが気になる。
ちょっとの晴れ間で試したら、358.5度となり、1.5度のズレがある。
たった1.5度とはいえ、これは大きい値である。
その後なかなか晴れ間がなかったが、
先週、台風の来る前にある程度の晴れ間があり、調整に行ってきた。

■カメラの向き(回転角度)の調整
PlateSolveしながら、ほぼ0度、正確には0.1度で妥協した。
■極軸調整の判断
M13に向け、ノーガイドで5分間の撮影を行ったところ、ほぼ点像であった。
流石はNJP、素晴らしい。
正確には、東西にほんの少し伸びていた。
ということは極軸は正確であると判断した。
(おまけ)
PlateSolveした結果は、NINAで確認できるが、画像を残しておくのを忘れた。
撮影画像さえあれば、PixInsightでも確認できるはず。
■PixInsightで回転角度の確認
・単純にFitsヘッダー情報を見ればよいだろうと思って
画像を開き、右クリックでFitsヘッダー情報を表示してみた
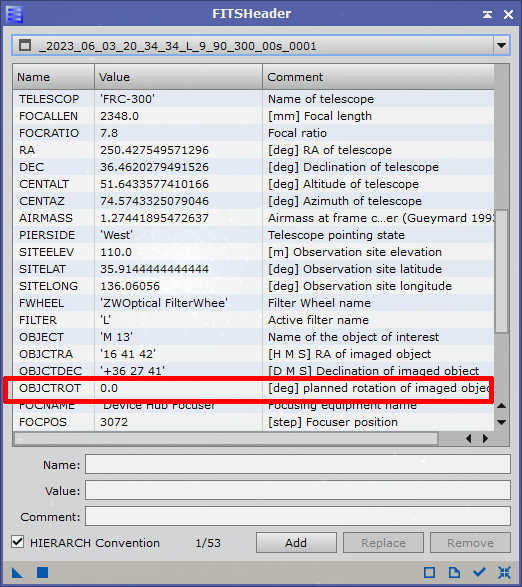
回転角度は0度とあるが、これは嘘だ。撮影時のローテータの角度である。
ローテータはシミュレータを登録しており、正確な情報ではない。
・PixInsightでもPlateSolveは必要だった
画像を開き、SCRIPTからPlateSolverを実行する
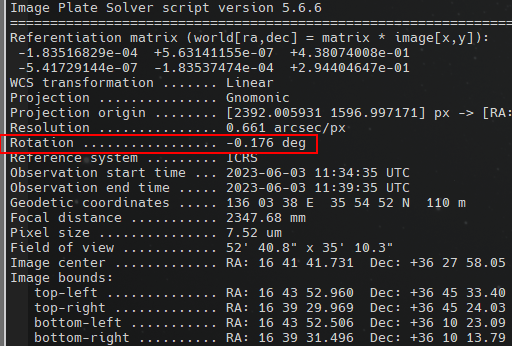
この結果、-0.176度とあるが、まあこんなものだろう。

コメントする