ご要望がありまして、MaxImDLでSBIGのAOを使う方法
■前提条件
当然のことながら、CCDカメラはSBIGのカメラでAO-8/AO-Lが装着されていること
SBIGのサイトから、SBIG DriverChecker.exe(64bitならSBIG DriverChecker64.exe)を
ダウンロード・実行し、ドライバを組み込んでおく
カメラを接続し、PC接続後にカメラのファンが回っていること
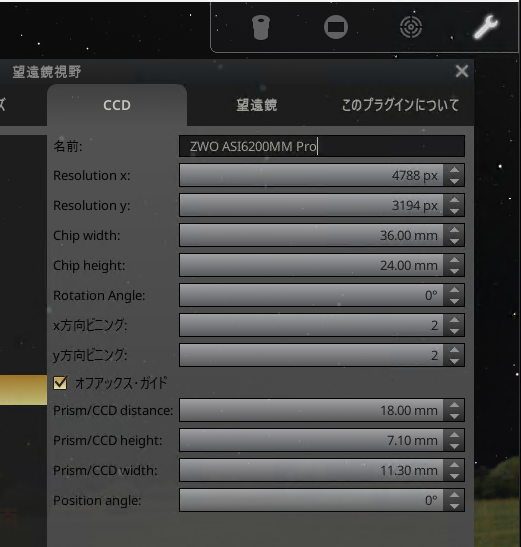
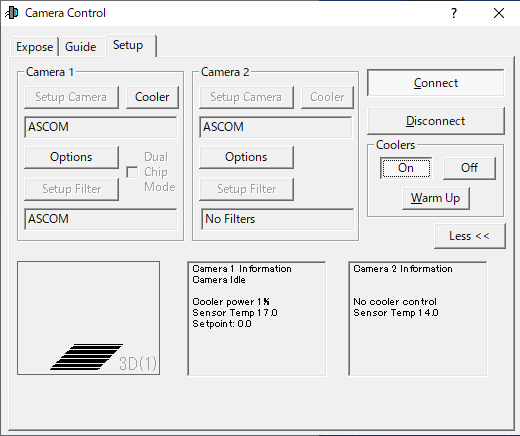
■まずはカメラの設定から。(MaxImDL V5を使うパターンでの説明)
MaxImDLを起動し、Camera Control ウインドウを出す(Setupタブ)
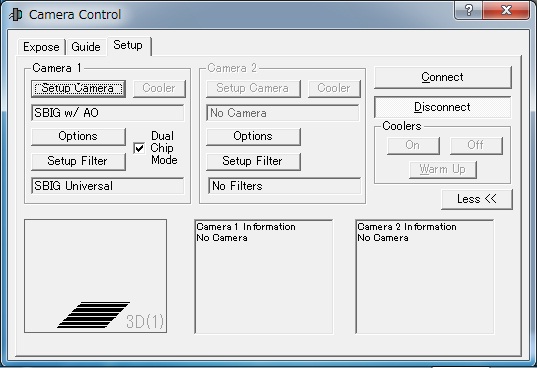
・Camera 1 の "Setup Camera"ボタンをクリックし、
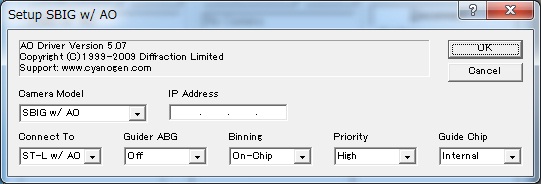
カメラを "SBIG w/AO"を選択、
"Connect to"、USBか接続されていればカメラのモデルが出ているものを選択
その他の項目はデフォルトでいいと思う
OKボタンで、Camera Control ウインドウに戻す
・Camera 1 の "Options"ボタンをクリック
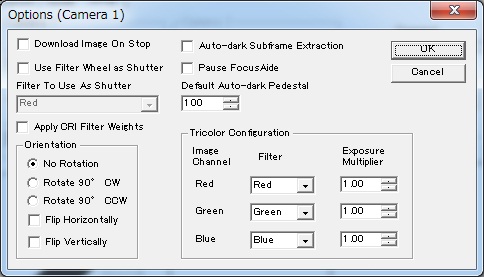
ここではデフォルトのままでいい
"Orientation"で、カメラを縦構図にした場合、北を上にした縦長の画像にする場合は
Rotate 90°CW or CCW にすると実イメージに近い
AO-7とかプライムフォーカスとかで裏像になる場合は、Flip Horizontallyにチェックを
入れておくと裏像ではなく正像で画像を出してくれる。
OKボタンで、Camera Control ウインドウに戻す
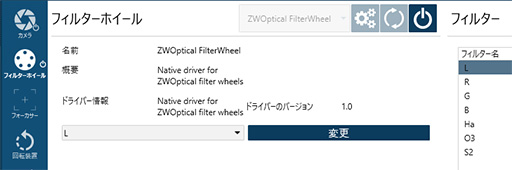
・Camera 1 の "Setup Filter"ボタンをクリック
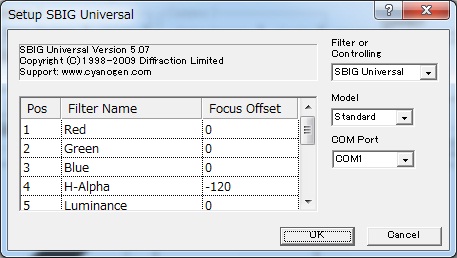
モノクロカメラの場合、SBIGのフィルターホイールを使っているなら
"SBIG Universal"を選択し、フィルター情報を正確に登録する。
フォーカサーが装着されているなら、"Focus Offset"にフィルター毎のピント移動量を
登録しておくと大変便利である。
OKボタンで、Camera Control ウインドウに戻す
・Camera 1 の "Dual Chip Mode"はチェックを入れておく(チェックなしでも使えるが)
ここまで設定が完了したら、
・"Connect"ボタンでカメラと接続する
・"Cooler"ボタンで冷却温度を指定し、"Coolers"の"On"ボタンで冷却を開始する。
カメラと接続したら、"SBIG AO Control" というAO専用のウインドウが出現する。
AOの制御はすべてこの"SBIG AO Control"で行う。
その前に、ちょっと寄り道。
■AOを使うためには、何よりもガイド星が重要
十分輝度のある、条件のいいガイド星に恵まれないとAOガイドはうまくいかない。
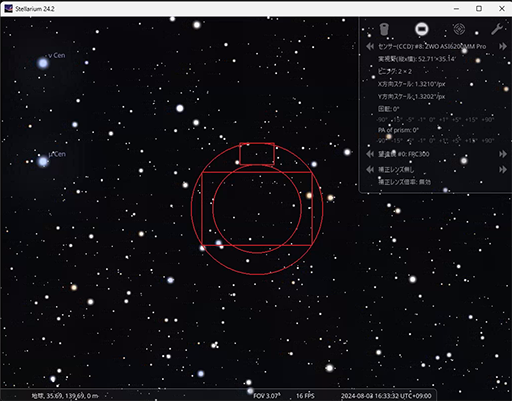
■AOを使うためには、事前調査が重要で、ガイド星の有無・カメラの向きを決定しておくこと。
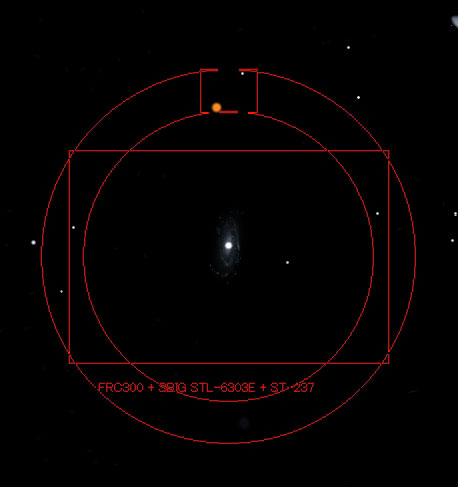
これはNGC5033の場合の例であるが、北を上にした横構図で、うまい具合にいいガイド星がある。
小さい対象なら構図をずらしても構わないし、あるいはカメラを回転させて明るめのガイド星を
うまくガイドチップに乗せられるかがポイントである。
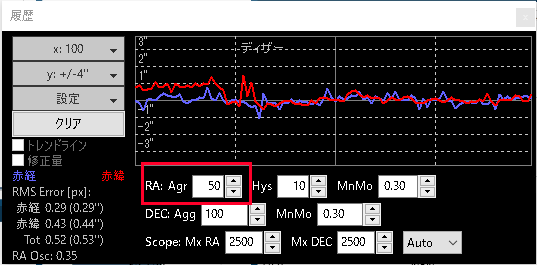
■SBIG AO Control で AOを使う場合の設定(Setupタブ)
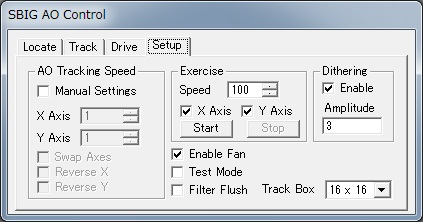
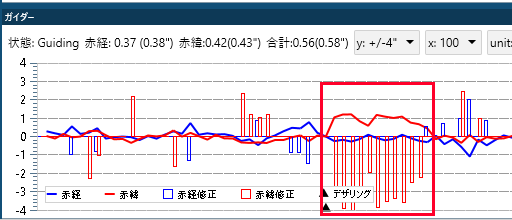
この画面での設定項目は、"Dithering"
これは撮影の度に微妙に数ピクセルずらして撮影してくれる。画像処理の際に欠陥ピクセルの情報を除去できるためには有効な機能なので、これを積極的に使った方が良い。
あとはデフォルトで構わないし、"Exercise"はAOの動作確認のために行う。
■SBIG AO Control で AOを使う場合の設定(Driveタブ)
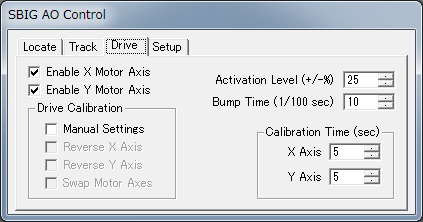
ここでは、セルフガイド機能についての設定を行う。
この画面ではまずはデフォルトのまま使う。
使っていく中で必要があれば設定を変更する。
・Enable X Motor Axis, Enable Y Motor Axis、どちらもチェックあり。
チェックを外すとセルフガイドが効かなくなる。
AOだけでセルフガイド不要の場合にチェックを外す。
・Drive Caribration
デフォルトで使う
・Activation Level
デフォルトの25%で使う。
AOガイドは、最初50%の位置から開始する。50%というのはガイド星の位置である。
AOガイドしていく過程でわずかな極軸のズレやピリオディックエラーでガイド星の位置が
ずれていくが、ある程度の範囲まではAOだけでガイドする。
AOガイドの限界を超えるとセルフガイドが発動し、赤道儀のモーターを補正する。
このセルフガイド発動までの範囲を%で指定する。
つまり、デフォルトの25%というのは、
25% -- 50% -- 75%
中心
この範囲内はAOガイドし、25%以下ならセルフガイドでモーター補正し、
25%以上の位置に強制的にもってくる。75%以上の場合も同様
セルフガイドの発動タイミングを早める場合は、20%の設定にする。
30%以下か、70%以上でセルフガイドが発動する。
・Bump Time
セルフガイドでモーター補正を行う場合の強度で、モーター補正する時間の指定
セルフガイドが発動した場合に、動きが大きすぎる場合は値を小さく、
動きが足りない場合は値を大きくする。これはある程度動きをみないと適正値はわからない。
・Caribration Time
セルフガイドのキャリブ時のモーター作動時間
北を上にした横構図では、X軸は赤経、Y軸は赤緯に相当する。
長焦点ならX軸、Y軸ともに5秒程度で十分
短焦点なら長め(10秒以上)にしないと十分な移動量がなくキャリブは失敗する
(短焦点でAOを使う意味があるのか?ということはおいておくが)
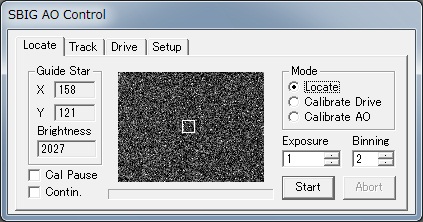
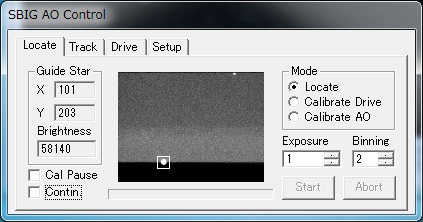
■SBIG AO Control で AOを使う場合の操作(Locateタブ)
・"Mode" の "Locate" にチェックを入れ、"Start"ボタンで、ガイドチップの露光を行う。
Exposureは露光時間(1秒程度で)、Binningはビニング(2程度で)、必要に応じて変更
"Cal Pause" AOキャリブでエラーが出る場合にチェックを入れて試す、とある。
"Contin" チェックを入れると連続露光(Continuous)してくれるが、チェック不要でいい。
"Start"でガイドチップの撮像を行い、ガイド星の状況を確認する。
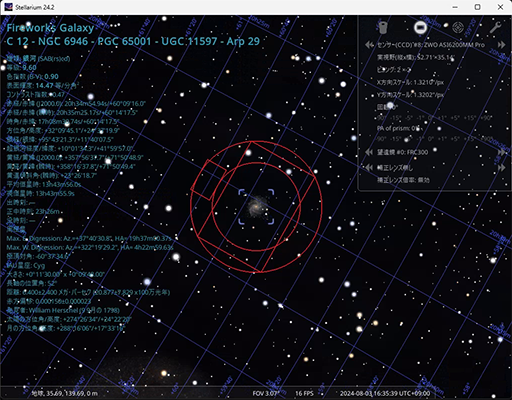
上のNGC5033の場合、
導入がうまくいっていれば、このように星図上のガイド星と撮像した画像が同じになるはず。
事前の撮影計画でのガイド星の配置をうまく再現し確認すること。
これがうまくいかないと(構図間違いなど)、撮影そのものがうまくいかない。
・"Mode" の "Caribrate Drive" にチェックを入れ、"Start"ボタンで、
セルフガイドのキャリブを行う。
このキャリブがうまくいかないと撮影は失敗する。非常に重要なポイントである。
※キャリブ成功のコツ
・明るめのガイド星を中央付近に配置する。周辺にあると移動して見失うから。
・キャリブの動きを見ながら確認する。
移動量が足りなければ、"Drive"タブの"Caribration Time"を多くする。
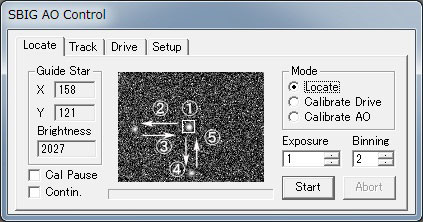
正常に動作した場合の動きは、北が上だと
①で最初の状態で位置を確認
②で+Xで赤経モーターを"Caribration Time(X)"の秒数だけ動かす ②の場所へ
③で-Xで赤経モーターを"Caribration Time(X)"の秒数だけ動かす ①の場所へ
④で+Yで赤緯モーターを"Caribration Time(Y)"の秒数だけ動かす ④の場所へ
⑤で-Yで赤緯モーターを"Caribration Time(Y)"の秒数だけ動かす ①の場所へ
このような動きをすればOK、失敗したら失敗したメッセージが出る。
モーターは高速動作だと激しく動くので低速に(テンマのハンドコントローラー)
ドライブキャリブはカメラの向きを変えない限り使い回しが可能。
カメラの向きを変えたらキャリブし直しするが、AOの場合は明るめのガイド星を用意するし
キャリブも2分程度で終わるので面倒がらずに実行する。
・"Mode" の "Caribrate AO" にチェックを入れ、"Start"ボタンで、
AOガイドのキャリブを行う。
このキャリブはAO単体で行い、赤道儀は無関係。ほぼ一発で通る。
これは一度実行しておけばそれでよい。
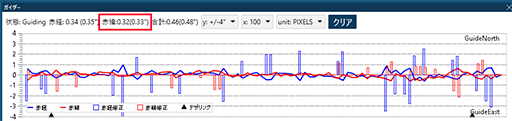
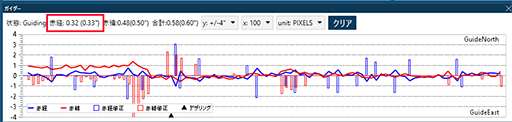
■SBIG AO Control で AOを使う場合の操作(Trackタブ)
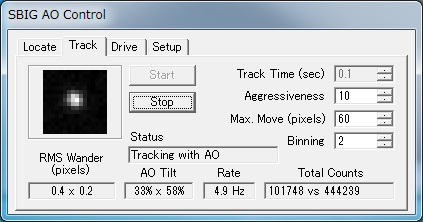
ここまで準備して、いよいよAOガイドの実行となる。
"Locate"タブで、"Locate"で撮像し、ガイド星の周囲に四角い枠がある状態で"Track"タブにし、
"Start"ボタンをクリックしてAOガイドが始まる。
しばらく様子をみて、ガイドが安定しているのを確認する。
"Track Time"、できれば0.1秒、暗いガイド星なら0.2秒とか0.5秒とか
"Agressiveness"も様子を見ながらあげたり下げたりする。5~7程度でいいと思う。
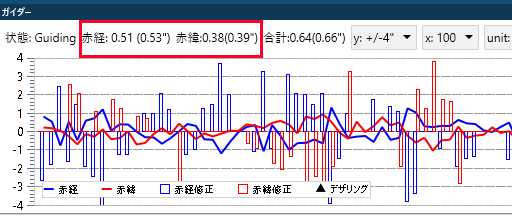
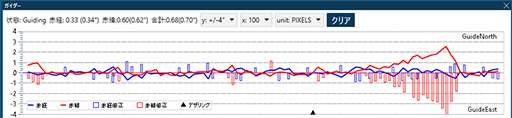
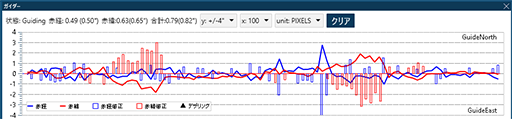
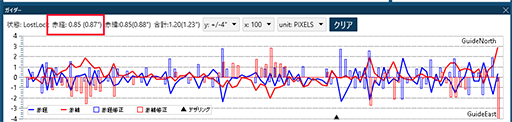
"RMS Wander"、0.1や0.2ならまあいいシーイング。
0.5とかそれ以上は悪いシーイングでガイド星があちこち暴れる。
"AO Tilt"、X軸とY軸のガイド星の位置を%表示
ある程度の範囲外になるとセルフガイドが発動する。
AOガイドが安定したら、撮像シーケンスを組んで本番撮像となるが、これは"Camera Control"で行う。