次は架台の制御だ。
家にあるEM10Temma2をパソコンと接続する。
寝かせたまま、クランプは緩めておき、空回りさせる。
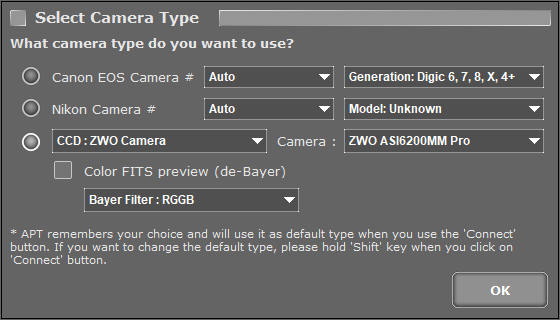
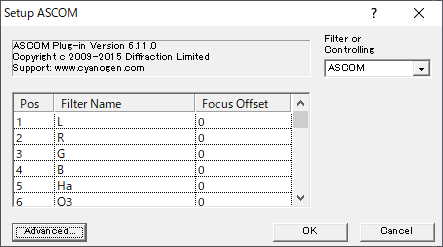
架台の設定は、ASCOMから選択する。
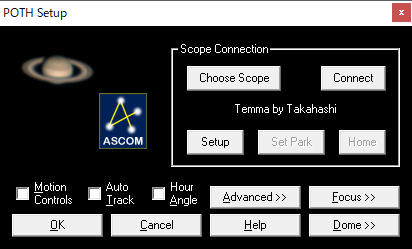
POTH HUBから、タカハシTemmaを選択。
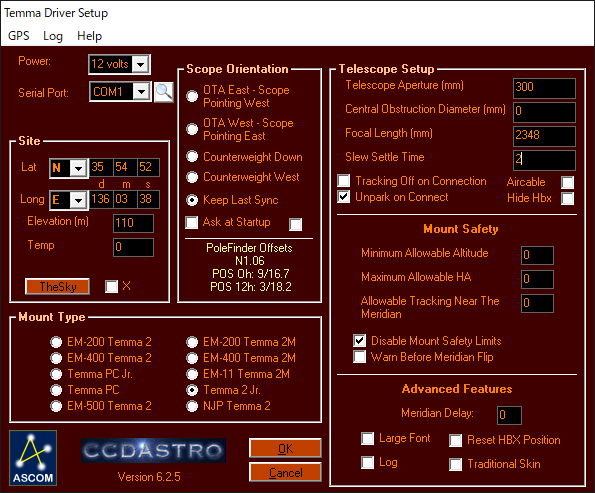
Temmaの設定、これはMaxImDLからでも同一となる。
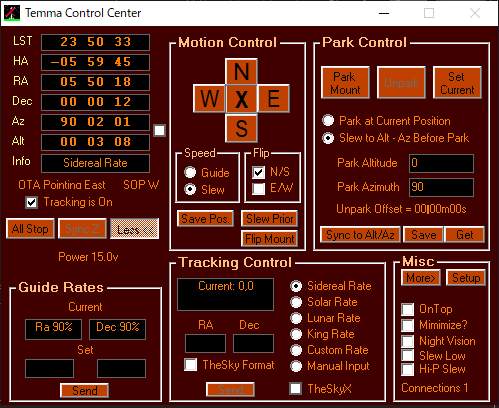
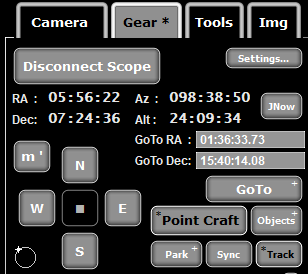
Connectすると、タカハシTemmaの画面が出る。
パークは解除され、パーク位置からのスタートだ、MaxImDLと同一。
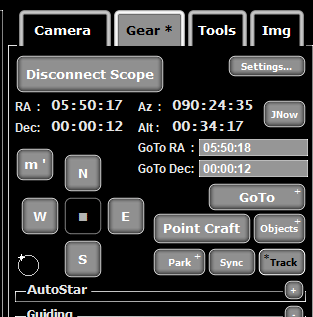
APTの画面右側、Alt, Azは、パーク位置の座標を示す。
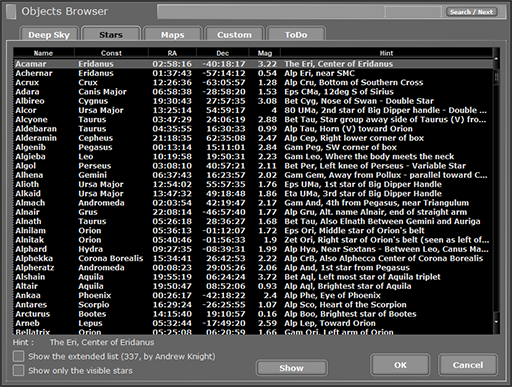
上の画面の"Objects"のボタンを押す。
基準星や、M/NGC天体を選んで"GOTO"ボタンで対象の天体に向け赤道儀が動く。
UIは異なるが、MaxImDLと同様に操作ができるのはよい。
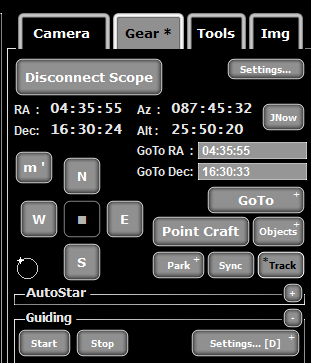
アルデバランにGOTOした状態。
PlateSolveするには、"Point Craft"ボタンから行うが、
まずはその初期設定だ。
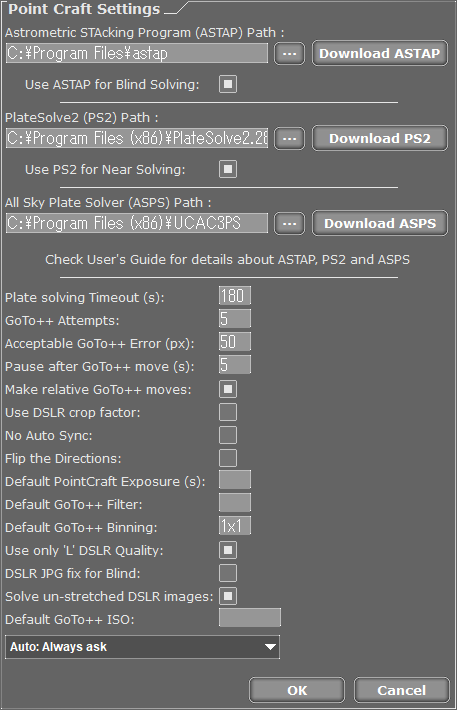
この画面の通り、ASTAP, PS2, ASPSをダウンロードし、インストール。
星図カタログも指定先にインストールしておく。
インストール先のフォルダを設定してやればよい。
"Blind"の場合は、ASTAP、"Near"の場合は、PS2のチェックを入れておく。
Blind Solveは、どこを向いているかわからない場合の解析、
Near Solveは、赤道儀の示す座標を中心に解析するものと解釈した。
MaxImDLのPinPointは、ここでいうNear Solveと同等だな。
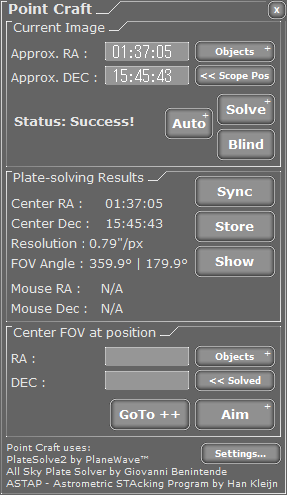
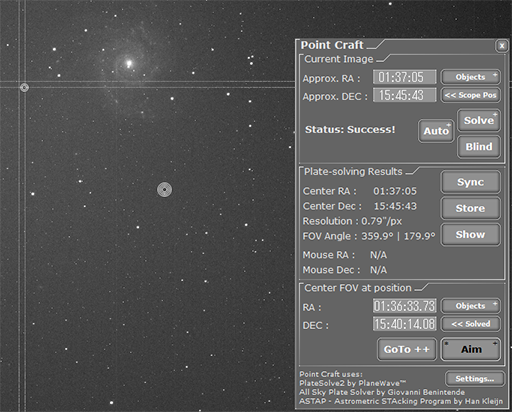
これが"Point Craft"の画面だ。
通常は、基準星(この場合はアルデバラン)と思ってGOTOした画像を解析し、
実際の撮影画像の座標を取得するのだが、
その場合は、"Solve"ボタンを押下する。
設定では、PS2でPlateSolveすることになる。
別の用途として、前回撮影した画像を読み込ませ、
その画像の通りに導入したい場合もある。
この場合は、"Blind"ボタンを押下し、ASTAPでPlateSolveしてみるのかな?
試しに、STL11000Mで撮影したM74のL画像を読み込ませて、
"Blind"ボタンを押し、Blind Solveを行ってみた。
約40秒ほどかかり、解析は終了した。
fitsヘッダから座標を引っ張ているのかと思ったが、
約40秒もかかっているので、fitsヘッダは見ずにちゃんとまともに解析しているようだ。
FOV Angleも正しく計算しているようだし、素晴らしい。
このBlind Solve、恐るべしというか、実に素晴らしい。
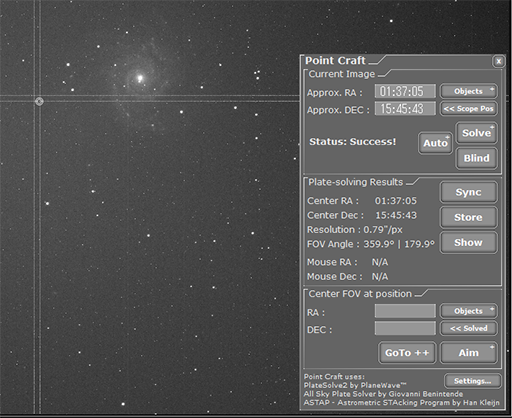
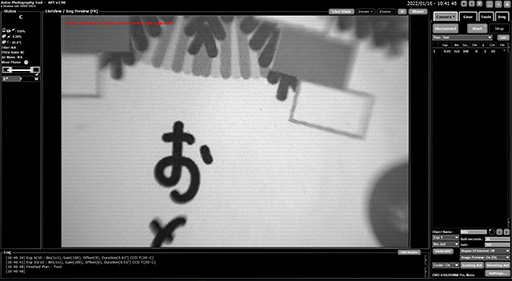
M74のBlind Solveによる結果の画面だ。
M74の中心から左下に、画像の中心がある(十字線の中心)。
十字線の中心の〇が、Blind Solveした座標になる。
この画面の、"<< Solved"ボタンで、座標を表示した後で、
"GOTO++"ボタン押下で、上の〇の位置に撮影解析しながら自動導入してくれる。
これは素晴らしい機能だ。
実際に試してはいないが、おそらく正しく機能するだろう。