次は、オートガイドの設定と確認だ。
ガイドカメラにはST4互換のポートがあり、
そのまま接続したがどうも機能しない。※
キャリブレーションが失敗し、何も動いていない。
(PHD2では、On Cameraの設定)
どうしてもだめだ、寒くて考える力がなくなってくる。
そういえば別のやり方があったことを思い出した。
ガイドケーブルがだめなら、ASCOMで直接赤道儀を制御するやり方だ。
(PHD2では、Takahashi Temma で接続)
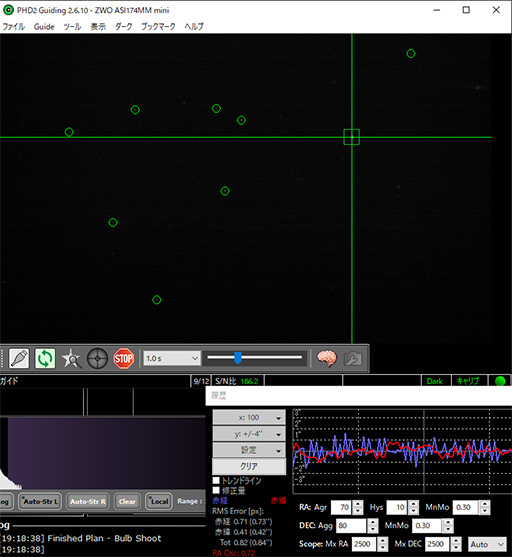
これでキャリブレーションも通り、マルチスターガイドも順調だ。
かなり暗い星も捉えているようで、15等級あたりの星かな?

NGC2359に向け、5分のガイド撮影、ここまでは問題ない。
※後で調べたら、ST4互換とSBIGは結線が逆とのこと、、、orz。
おかしいと思ったよ。
うまくいかなくて当然だったのだが、
結線を変えて次回チャレンジしてみるつもり。

新鋭のASIminiではどうかわかりませんが、旧ASI120MMだと、8bitにしないとガイド信号が出ない問題がありました・・
ST4互換は、スターライトのカメラとは配線が逆になってますが、
流石にSBIGが基準だと思うんですが・・。
それでも、信号が出ればどこかに星は動くので、配線起因ではないような。。。と、思ったのですが、どうなんでしょうね。
UTOさん、コメントありがとうございます。
確かに、8bit/16bitの設定があり、16bitでガイドはできています。
キャリブ失敗の様子を見ていると、4方向のうち、最初の1方向で延々と失敗をくりかえしているので、どうにもダメでした。
私のところでは、オンカメラのST-4 コネクションにZWOの付属のコードをドイツのボクドルファーMTSとつないで問題なくガイドできたので、TemmaのST-4は逆に、オリジナルのSBIG規格なのかもしれませんね。SBIGのST-8とZWOを接続する際には、リバースケーブルが必要でした。今はもう使うことがないですが。
PHDの、ガイドアルゴリズムのZフィルターを使ってみると、条件と設定次第ではかなり成績が良かったので、それを使うこともあります。モニターのリフレッシュレートは0.1秒、コントロールコマンド頻度は3秒などとしてシーイングの動きにフィルターをかけて消すというのが、売りですね。
それでも、
DECに、シンプルなレジストスイッチを使うというのが案外良かったりする場合もあるので世の中は単純にはいかないですね。
逆に、
PHDは高度すぎて、むしろ旧式なマキシムDLのガイドの方が発振もせず、安定度は高いという印象もあります。
ガイドソフトでは、Metaguideという無料ガイドソフトの人気も高く、私もトライしていますが、雰囲気的にPHDのZフィルターに似ています。ガイドのリフレッシュレートが0.1秒なので。
でも使いこなしがかなり難しくまだ使えていません。ガイド星に綺麗なジフラクションリングの再現を要求してきます。
今までAOガイドをしていた方なら、このあたりの高精度なガイドでないと満足できないのではないかと思ったりもします。(笑)
n2068ddさん、おはようございます。
今朝は雪で埋もれました。
ガイドケーブルの信号は真逆なようで、なんで業界的に統一してくれないのかわかりません。
PHDガイドに関しては、まずはデフォルトで動作を基本として、これはOKでしたので、次は最適な設定を追い込む段階になりますが、まだそこまで進んでおりません。
ガイドはオーバーシュートしているような気もします。
露光時間は1秒とか2秒ですが、これを6秒まで伸ばすか、ガイドの反応強度を落とすか何らかの対策はしたいと思っています。
AOガイドはよくできた装置だと思いますがガイド星に制限されてしまうという欠点があり何とも言えませんね。
>ガイドはオーバーシュートしているような気もします。
そうですね。
赤い字で、RA OSC と表示のある値が、発振度合いのパラメーターで、0.72というのは、オーバーシュートです。
解説によりると、
「ガイドしている動作が本来の動きの方向と逆となっている動きの割合。」別の言い方だと、ポジティブフィードバックになっている割合の値とのことです。
「0.5より高い場合は、シーイングを追いかけている場合がある。」とのことで、通常は0.5を超えないように設定します。
それなら、どれくらいが良いのか?
というのは、たぶん誰も分かっていないと思います。
赤道儀と望遠鏡が何十キロという慣性質量系を持っているので、シーイングの細かい動きには絶対追いつかないので、制御位相が反転する成分が必ずあるためですね。
なので、ゼロには出来ないので、通常は0.5を下回れば良いと聞いたことがあります。根拠は不明ですが。
このあたりの最適化は、ギヤの噛み合いやモーターの立ち上がり特性、コントローラーの同期も絡んで非常に複雑です。
おそらく、機械制御のプロの人たちは、伝達関数を求めて最適インピーダンスを計算していると思います。
アマチュアでは、「様子を見ながら極力鈍感にする。」ぐらいしかできません。(笑
n2068ddさん、こんばんは。
まだ使い始めたばかりでもう少し慣れが必要ですね。
RA OSC と表示のある値を、0.5以下を目指してトライしてみます。
ありがとうございました。